

桁架機械手在零件搬運中的效率如何提升
來源:www.lydlw.cn 發布時間:2023年09月28日
桁架機械手在零件搬運中的效率如何提升?桁架機械手廠家講述數控桁架機械手是一種常用于工業生產中的自動化設備,它可以實現對零件的快速、準確搬運,提高生產效率和質量。然而,為了進一步提升桁架機械手在零件搬運中的效率,我們可以從以下幾個方面進行優化。
首先,優化桁架機械手的運動控制系統。在零件搬運過程中,機械手需要完成各種運動,如抓取、放置、運輸等。因此,優化運動控制系統可以使機械手實現更快的加速度和減速度,提高運動速度和反應時間。同時,采用的運動控制算法和傳感技術,可以提高機械手的精度和穩定性,減少誤差。
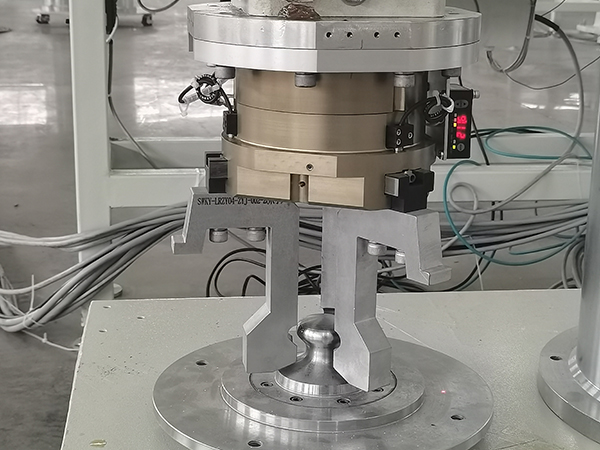
其次,優化桁架機械手的抓取裝置。抓取裝置是機械手與零件之間的接觸點,影響搬運效率和質量。通過設計更合理的抓取器和夾具,可以提高機械手對不同形狀和大小零件的抓取能力和穩定性。此外,采用自適應抓取技術,可以實現對不規則形狀和變動尺寸零件的自動抓取,減少人工干預和調整。
再次,優化桁架機械手的路徑規劃和軌跡優化。在零件搬運過程中,機械手需要根據工作空間中的障礙物和約束條件,規劃合理的運動路徑,以確保安全和有效完成任務。
通過采用的路徑規劃算法和避障策略,可以減少機械手的運動距離和時間,提高搬運效率。此外,通過優化軌跡規劃算法,可以減少機械手的擺動和震動,提高運動穩定性和零件質量。此外,優化桁架機械手的感知和識別系統。在零件搬運過程中,機械手需要實時感知和識別工作環境中的零件和障礙物,以做出相應的決策和調整。
因此,通過采用的傳感器技術和圖像識別算法,可以實現對零件位置、形狀和狀態的準確和快速感知和識別,提高機械手的自動化程度和工作效率。優化桁架機械手的控制和協調系統。在多機械手協作和多道工序搬運任務中,需要實現機械手之間的協調和通信,以確保整個搬運系統的有效和順利運行。通過采用協調控制算法和通信協議,可以實現機械手之間的任務分配和調度,提高系統的整體效率和響應速度。
綜上所述,通過優化桁架機械手的運動控制、抓取裝置、路徑規劃、感知識別和協調控制等方面,可以進一步提升機械手在零件搬運中的效率。這不僅可以減少人工搬運的勞動強度和誤差,還可以提高生產效率和質量,降低生產成本,提升企業競爭力和經濟效益。因此,加強桁架機械手技術的研發和應用,對于推動工業自動化和智能制造具有重要意義。
【相關文章】






聯系人:楊總
聯系電話:13986388432
聯系人:李總
聯系電話:15971052931
網址:www.lydlw.cn
備案號:鄂ICP備18008820號
地址:湖北省襄陽市高新區汽車工業園新光路1號2幢
聲明:部分素材來源于網絡,如有侵權,請告知我們刪除!
